In This is a problem of sizing of a planar RR manipulator (Rotoïde, Rotoïde).
A planar RR manipulator consists of a rotoid link parameterized by its rotation angle q1 followed by an arm of length l1 and then a rotoid link parameterized by its rotation angle q2 followed by an arm of length l2. The problem is to size the RR manipulator to reach one or more points in the plane.
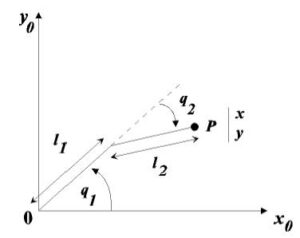
To design this manipulator implemented in (0, 0) in the plane, it is necessary to determine the values of the design variables l1 and l2 such that there is a value of the couple of operating variables (q1, q2) allowing to reach a reference frame P given in the plane by the coordinates of its origin (x, y) and an angle q of orientation of its x-axis. The notation used is that of Denavit-Hartenberg limited to the dimension of the plane.
If we want to reach n points P1, P2, …, Pn in the plane with our RR planar robot, we will have to determine a couple of values l1, l2 such that whatever the point to be reached among the n, this point is reachable.
A full description of the adressed problem and of the related DEPS models is available in section 9.1. of [1] and here too.